

3. Velocidad de salida de un tren de engranajes fijos
Si a la pareja de engranajes anterior se le añade un tercer engranaje C que engrane con B, la velocidad de C se obtendría a partir de la velocidad de B como
{\omega _C} = \pm {\omega _B} \cdot \dfrac{{{z_B}}}{{{z_C}}}
Sustituyendo la velocidad de B en función de la velocidad de A, se obtiene
{\omega _C} = \pm {\omega _A} \cdot \dfrac{{{z_A}}}{{{z_B}}}\cdot \dfrac{{{z_B}}}{{{z_C}}}
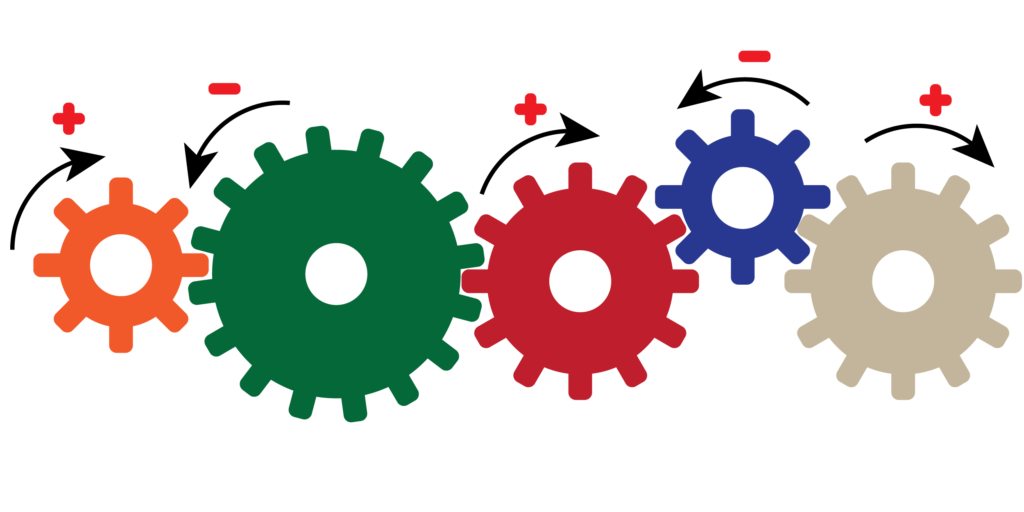
Siguiendo este procedimiento, si el tren estuviera compuesto de 5 engranajes, A-E (ordenados de izquierda a derecha), la velocidad del salida en E (marrón) se calcularía a partir de la velocidad en la entrada A (naranja) como
{\omega _E} = \pm {\omega _A} \cdot \dfrac{{{z_A}}}{{{z_B}}}\cdot \dfrac{{{z_B}}}{{{z_C}}}\cdot\dfrac{{{z_C}}}{{{z_D}}}\cdot\dfrac{{{z_D}}}{{{z_E}}}
 Analizando la fórmula obtenido se observa que:
Analizando la fórmula obtenido se observa que:
- En el numerador se sitúan el número de dientes de aquellos engranajes que son conductores, es decir, que transmiten su movimiento al siguiente.
- En el denominador está el número de dientes de los engranajes conducidos, es decir, que reciben movimiento del anterior.
{\omega _s} = \pm {\omega _e} \cdot \dfrac{{\prod {{z_{conductores}}} }}{{\prod {{z_{conducidos}}} }}
En un tren, normalmente los engranajes pueden ser tanto conductores como conducidos, como ocurre en este caso, lo que permite simplificar el cálculo. La velocidad de salida es función de la velocidad de entrada y la relación entre el número de dientes del primer engranaje (A) y el último (E)
{\omega _E} = \pm {\omega _A} \cdot \dfrac{{{z_A}}}{{{z_E}}}
Nota: la elección del signo siempre quedará definida por el sentido de giro relativo (igual o contrario) de ambos engranajes.
4. Ejercicio
Obtener la velocidad y sentido de giro del engranaje F, sabiendo el número de dientes de todos los engranajes del tren y que el engranaje A gira a 200 rpm en sentido horario.
Se observa como el tren está formado de dos partes distintas: el conjunto A-C y el conjunto D-F, siendo los engranajes C y D solidarios al estar unidos por el mismo eje. Esto quiere decir que la velocidad de giro de C y D es la misma.
Siguiendo la explicación anterior, lo engranajes exteriores giran en sentido contrario, por lo que:
- Se toma el sentido de giro de A como positivo (+), sentido horario.
- B engrana exteriormente con A, por lo que girará en sentido contrario a A, antihorario (-).
- C engrana exteriormente con B, por lo que girará en sentido contrario a B, horario (+).
- D es solidario a C, llevando el mismo sentido de giro horario (+).
- E engrana exteriormente con D, por lo que girará en sentido contrario a D, antihorario (-).
- F engrana exteriormente con E, por lo que girará en sentido contrario a E, horario (+).
En definitiva, el sentido de giro de F es el mismo que el de A, horario.
La velocidad de giro se obtiene a partir de los engranajes conductores y conducidos. Los engranajes A y D son conductores, los engranajes C y F son conducidos y los engranajes B y E son tanto conductores como conducidos. Por lo tanto
{\omega _F} ={\omega _A} \cdot \dfrac{{{z_A}}}{{{z_B}}}\cdot \dfrac{{{z_B}}}{{{z_C}}}\cdot\dfrac{{{z_D}}}{{{z_E}}}\cdot\dfrac{{{z_E}}}{{{z_F}}}
{\omega _F} = {\omega _A} \cdot \dfrac{{{z_A\cdot z_D}}}{{{z_C\cdot z_F}}}=200\cdot\dfrac{{{40\cdot 20}}}{{{10\cdot 20}}}=800\,rpm
La velocidad de salida del tren será de 800 rpm en el mismo sentido de giro que la velocidad de entrada.