4. Ejercicio
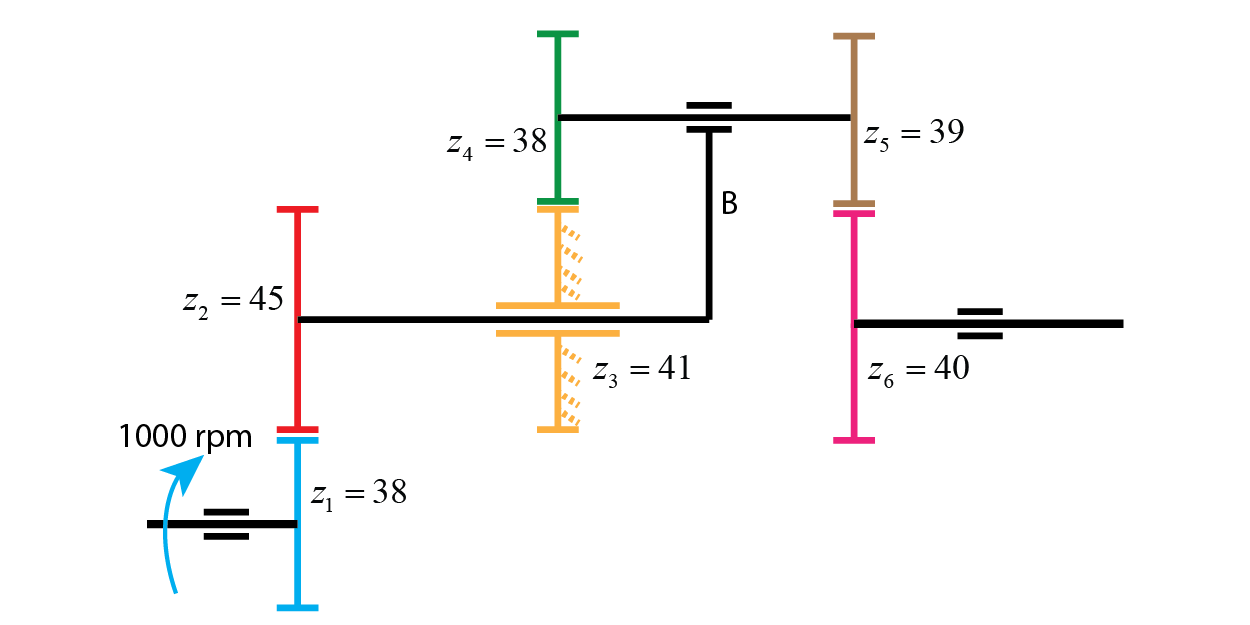
Obtener la velocidad y sentido de giro del engranaje 4 y del brazo sabiendo que el engranaje 2 gira a 900 rpm en sentido horario y que el engranaje 5 está fijo (bloqueado).

Se observa que se trata de un tren planetario donde el eslabón 3 corresponde con el brazo. Este gira el movimiento del engranaje 4, que se desplaza mientras gira alrededor del engranaje 2. Para poder obtener las velocidades del brazo y del engranaje 4 debemos aplicar la ecuación de Willis. Sin embargo, primero es necesario conocer los sentidos de giro para poder utilizar la correctamente.
El análisis de sentidos de giro debe completarse imaginando que se trata de un tren de engranajes fijos, es decir, ninguno de desplaza de su posición. Aunque se trate de una situación irreal, permite seleccionar el signo positivo o negativo en la aplicación de la fórmula. El resultado posterior del cálculo indicará el sentido de giro real:
- El engranaje 2 gira en sentido horario, el cual tomaremos como sentido positivo (+).
- Si se tratara de un tren de ejes fijos, como los engranajes 2 y 4 son exteriores, el sentido de giro del engranaje 4 sería contrario al engranaje 2. Por lo tanto, giraría en sentido antihorario, que es negativo (-).
- Finalmente, si el tren fuera de ejes fijos, como los engranajes 4 y 5 son interiores, 5 giraría en el mismo sentido que 4. Es decir, giraría en sentido antihorario negativo (-).
Ahora ya estamos preparados para aplicar la fórmula de Willis. Esta fórmula tiene 3 variables, las velocidades de salida y entrada y la velocidad del brazo, por lo que se necesita conocer al menos dos para poder aplicarla. En este caso, sabemos la velocidad de entrada del engranaje 2, \omega_2=900\,rpm, y conocemos la velocidad de salida del engranaje 5. Como es un engranaje bloqueado, \omega_5=0\,rpm.
De este modo, utilizando el signo (-), como ambos engranajes girarían en sentidos contrarios en un hipotético tren fijo, obtenemos la velocidad del brazo, \omega_b, multiplicando por los engranajes conductores (2 y 4) y dividiendo por los conducidos (4 y 5) como
\dfrac{{0 – {\omega _b}}}{{900 – {\omega _b}}} = – \dfrac{{24 \cdot 40}}{{40 \cdot 104}}
Despejando, se obtiene {\omega _b} = 168,75\;rpm. Es decir, el brazo gira en sentido horario, que es el positivo.
Conociendo esta variable, podemos volver a aplicar la ecuación, tomando como entrada la velocidad del engranaje 2 y salida la velocidad del engranaje 4. En este caso, como girarían en sentidos contrarios en el hipotético tren fijo, se aplica la ecuación con el signo (-). El engranaje 2 es conductor y el engranaje 4 es conducido.
\dfrac{{{\omega _4} – 168,75}}{{900 – 168,75}} = – \dfrac{{24}}{{40}}
Obtenemos {\omega _4} = – 270\;rpm. Es decir, el engranaje 4 gira en sentido antihorario.