


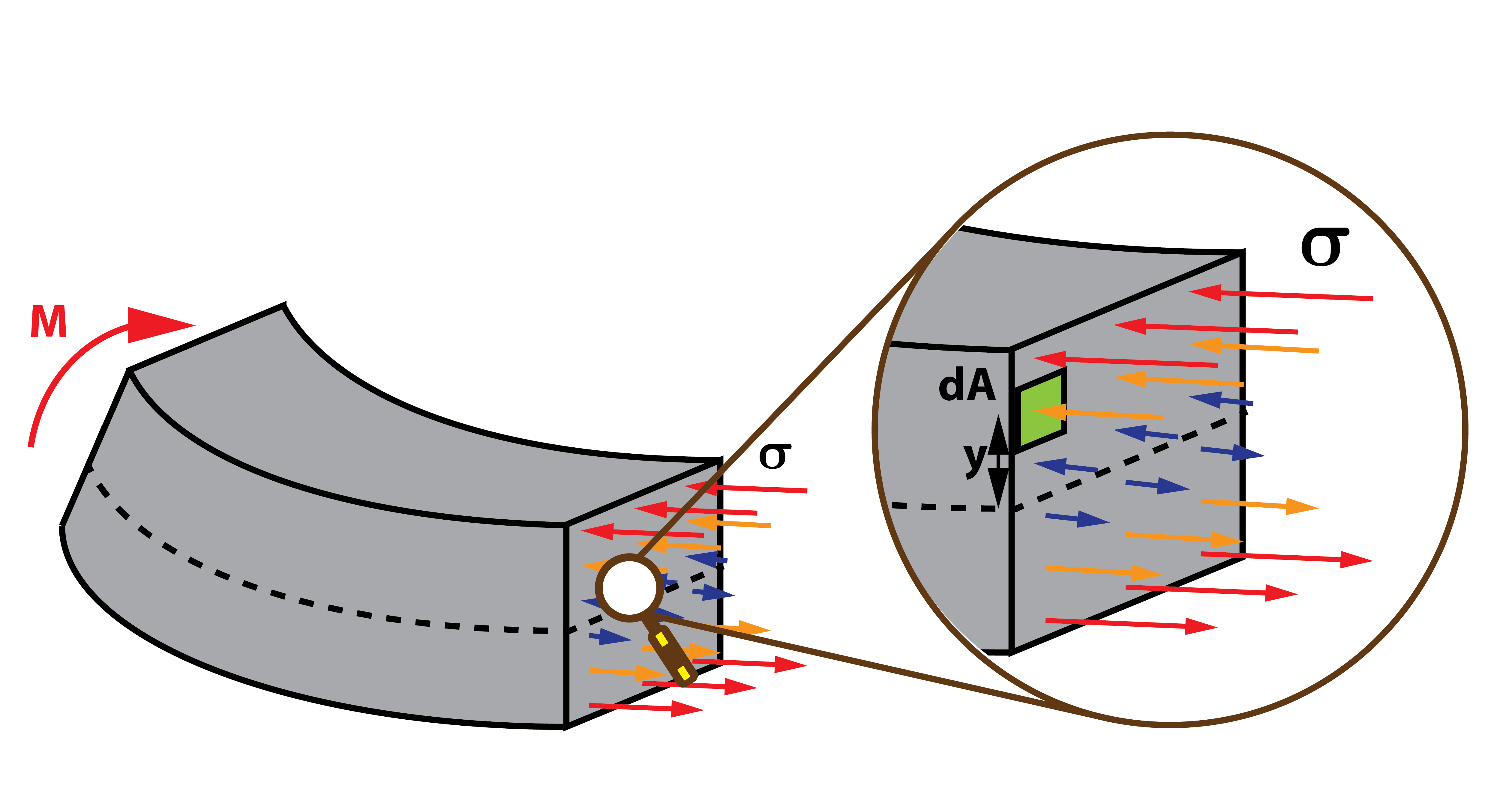
Esta situación es conocida como flexión pura, ya que no existen otro tipo de fuerzas aplicadas en la barra, por lo que no aparecen esfuerzos cortantes. Lógicamente, la barra sufre una deformación, se flexiona.
Podemos dividir la barra en dos regiones respecto del eje neutro, la región superior y la región inferior. Las fibras de la zona superior acortan su longitud, por lo que están sufriendo un esfuerzo de compresión, mientras que las fibras inferiores se alargan, están sometidas a un esfuerzo de tracción. La línea neutra no sufre ninguno de los esfuerzos, existiendo una transición clara entre una zona a otra.

Cuanto más alejadas se encuentren las fibras del perfil respecto de la línea neutra, mayor será el esfuerzo de tracción o compresión al que están sometidas, es decir, mayor será la tensión normal en esa sección. Recuérdese que los esfuerzos de tracción y compresión se caracterizan por la generación de tensiones normales en la pieza, perpendiculares a la sección de la barra.
Para calcular qué valor toma la tensión normal, σ, en cada posición del perfil es necesario realizar algunas operaciones matemáticas. Tras la aplicación del esfuerzo de flexión, la barra sufre una deformación, variando su geometría y curvándose alrededor de un centro, O.
Nombremos como R la distancia entre el centro y la posición de la fibra neutra, cuya longitud no hacambiado ya que es la única posición del perfil que no está sometida a tracciones o compresiones. La longitud inicial de la barra corresponde a la longitud del arco de circunferencia de radio R y ángulo θ.

Resolviendo la integral, se obtiene una expresión que coincide con la definición de segundo momento de inercia, I, que es una propiedad geométrica del perfil.
M = \int_s {\sigma \cdot y \cdot dA} = \int_s {\dfrac{{E \cdot y}}{R} \cdot y \cdot dA} = \frac{E}{R}\int_s {{y^2} \cdot dA} = \dfrac{E}{R} \cdot I
Reemplazando la expresión de la tensión, σ, se deduce la tensión normal producida como función del momento, M, la posición, y, respecto de la fibra neutra y el segundo momento de inercia de la sección.
M = \dfrac{E}{R} \cdot I = \dfrac{\sigma }{y} \cdot I \to\sigma = \dfrac{{M \cdot y}}{I}
El signo de la tensión normal es positivo en la zona traccionada (valores y positivos) y negativo en la zona comprimida (valores y negativos). El valor máximo de la tensión, producida en las fibras exteriores se obtiene la distancia y máxima. De esta ecuación se deduce que el segundo momento de inercia de la sección tiene una importancia muy relevante en el comportamiento a flexión. Cuanto mayor sea el valor de I, mayor será la resistencia del perfil ante este tipo de esfuerzo, ya que, al estar dividiendo, la tensión normal generada es menor.

También se puede definir el módulo resistente elástico de la sección, W_y, como la división del momento de inercia entre la distancia a la fibra más externa. Así, la tensión máxima se obtiene directamente dividiendo el momento aplicado entre el módulo resistente.
Tanto los valores del segundo momento de inercia, I, y del módulo resistente, W_y, se encuentran recogidos en prontuarios para los tipos de perfil más comúnmente usados en estructuras.
Os animo a ver el siguiente vídeo donde se detallan todos estos conceptos con animaciones!!